MCU: STM32F405RGT6, 168MHz, 1MB Flash;
IMU: ICM42688-P;
Blackbox: MicroSD card slot.
6x UARTs; 2x I2C; 3x ADC; 1x Softserial_Tx option (INAV); 10x PWM outputs.
Including
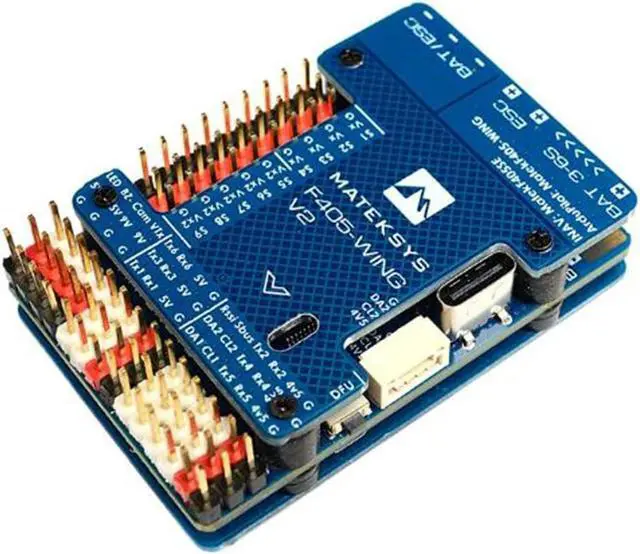
1x F405-Wing-V2
1x 20cm JST-GH-4P to JST-GH-4P cable for I2C port
Dupont 2.54 pins
(Board is shipped unsoldered)
INAV firmware MATEKF405SE must be 6.0. 0 or newer version.
Current sensor scale 150
5x Vx2 pads on S5~S9 rails are dead pins, If powering servos of S5~S9 rails with the built-in Vx BEC, bridge Vx2 to Vx pad with a drop of tin. If powering servos of S5~S9 rails with an external BEC, keep the gap open, you may connect external BEC to any pair of Vx2/G.
Softserial_tx1 is enabled on Tx2 pad by default for Frsky SmartPort telemetry. If using CRSF protocol receiver(TBS, ELRS etc), CPU based serial port (softserial) should be disable in INAV configurator.
GPS / DJI OSD and other digital video systems / CRSF protocol receiver can work with anyyyyyyy spare UART_TX & RX.
Airspeed sensor MS4525 works on I2C2 bus only.
ArduPlane firmware MatekF405-WING must be 4.4. 0 or newer version.
BATT_AMP_PERVLT 66.7
Use 5V active buzzer on Buz- and 5V pads, Tone alarm is not supported.
5x Vx2 pads on S5~S9 rails are dead pins, If powering servos of S5~S9 rails with the built-in Vx BEC, bridge Vx2 to Vx pad with a drop of tin. If powering servos of S5~S9 rails with an external BEC, keep the gap open, you may connect external BEC to any pair of Vx2/G.
non-inverted (hacked) S. Port signal is required for FPort or Smartport telemetry.
If sending highspeed serial data (eg. 921600 baud) to the board, use USART1 (Serial1).
 Holiday Shipping Details & Extended Holiday Returns
Holiday Shipping Details & Extended Holiday Returns 
