Your Browsing History

Meet Your Seller








Visit EmpressTech Store
FOLLOW
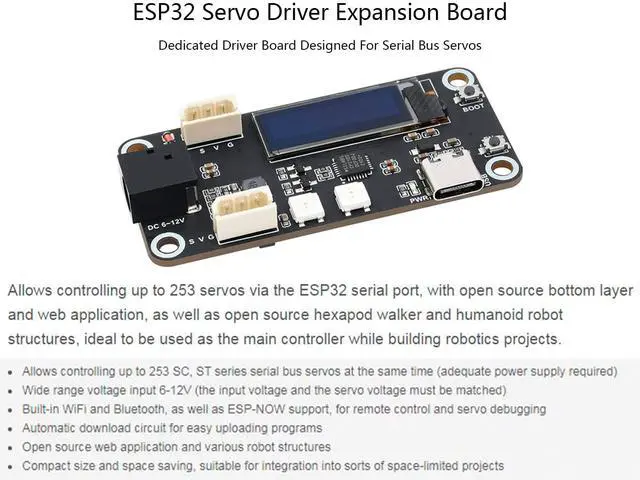
ESP32 Servo Driver Expansion Board, Built-in WiFi and Bluetooth, UART Serial Bus Control up to 253 Servos via ESP32 Serial Port Open Source Web Application and Various Robot Structures
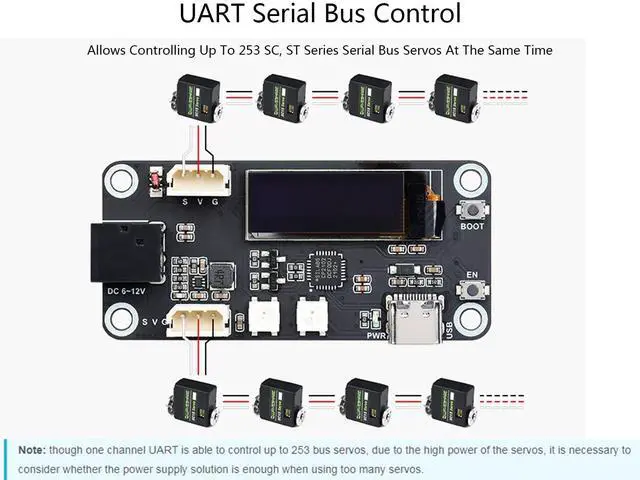
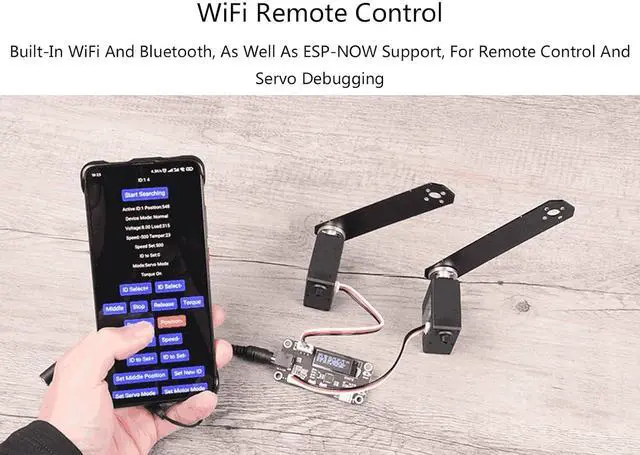
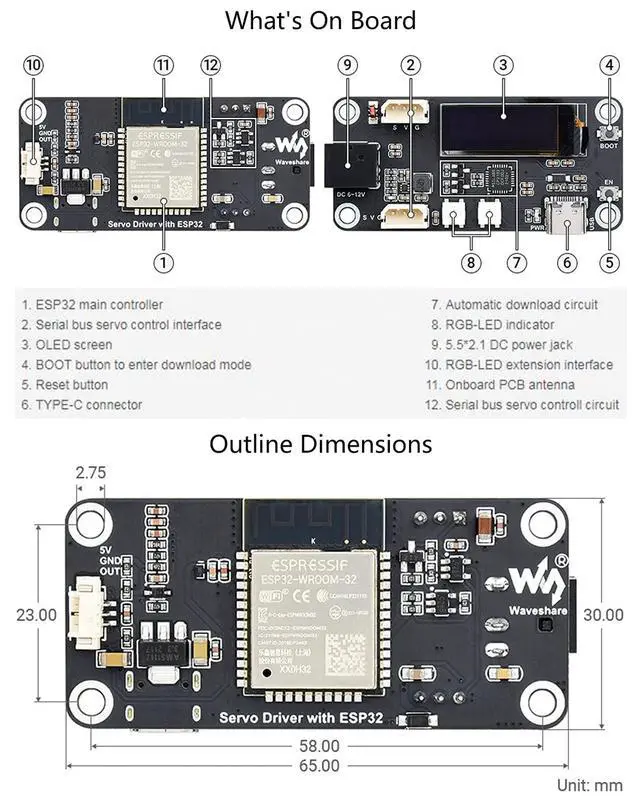
- Servo Driver with ESP32,UART Serial Bus Control: can control up to 253 units SC, ST series bus servos at the same time (provided that the power supply is sufficient). Note: though one channel UART is able to control up to 253 bus servos, due to the high power of the servos, it is necessary to consider whether the power supply solution is enough when using too many servos.; Built-in WIFI and bluetooth, support ESP-NOW at the same time, can remotely control and debug the servo. Automatic download circuit is convenient for uploading programs. Open source web application and various robot structures. Mini and compact, save space, suitable for embedding into various projects with high space requirements.; Input voltage VIN: 6V~12V (input voltage needs to match the servo voltage). Note: The input voltage must match the servo voltage, e.g. when using the SC15 Servo with a voltage of 6-8.4V, the input voltage of the DC port of the drive board should also be within the same range of 6-8.4V.; Main control chip: ESP32. Control method: UART. Download interface: Type-C. Power supply interface: 5.5*2.1mm DC. Product size: 65mm x 30mm. Fixing hole diameter: 3.0mm.; Application: Servos will provide various feedback like position, speed, torque lock, operating mode (servo mode, servo motor mode, etc.) for advanced projects requiring closed-loop automatic control. Ideal choice for building quadruped robots, hexapod walkers, robotic arms and other robotic projects requiring multiple servos.
+
+
Overview
Specs
Reviews
Any questions? Our AI mode will help you find out quickly.
Try me now
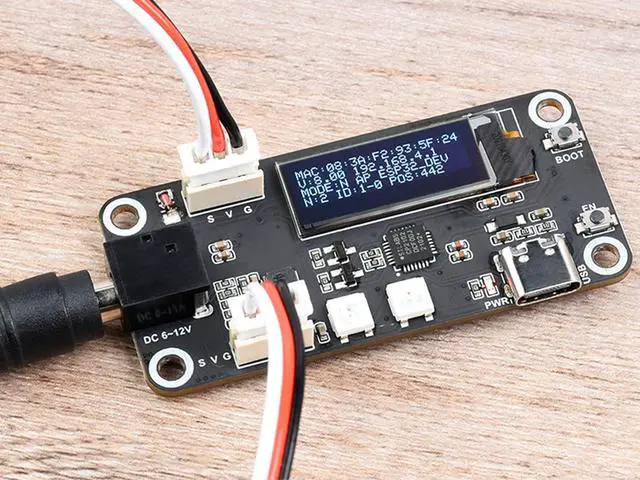
Overview This product is a bus servo control board based on ESP32. It provides routines that can control bus servos through the WEB terminal, and supports programming of servos to change the ID and working mode of the servos (servo mode/motor mode), etc., in theory, it can control 253 bus servos and read the current angle, load, voltage, mode and other information of each servo, and can use the serial port to communicate with the upper computer, which is used to build the lower computer of the robot project, and the on-board OLED The screen can be used to display key information and is suitable for robot projects such as robotic arms, hexapod robots, humanoid robots, wheeled robots, etc.
that require feedback on the angle and load of the steering gear.
Power supply connector: 5.5 × 2.1 mm
DC Download interface: Type-C
Controller: ESP32
Control interface: UART
Dimensions: 30 × 65mm
Mounting hole size: 2.75 mm
Mounting hole spacing: 23 × 58mm Application examples Servos will provide various feedback like position, speed, torque lock, operating mode (servo mode, servo motor mode, etc. ) for advanced projects requiring closed-loop automatic control Ideal choice for building quadruped robots, hexapod walkers, robotic arms and other robotic projects requiring multiple servos Online Development Resources /User
Manuall: // bit. ly/3JK3kev PACKAGE CONTENT Servo Driver with ESP32 x1 Screws pack x1
that require feedback on the angle and load of the steering gear.
Specifications
Supply voltage: DC 6-12VPower supply connector: 5.5 × 2.1 mm
DC Download interface: Type-C
Controller: ESP32
Control interface: UART
Dimensions: 30 × 65mm
Mounting hole size: 2.75 mm
Mounting hole spacing: 23 × 58mm Application examples Servos will provide various feedback like position, speed, torque lock, operating mode (servo mode, servo motor mode, etc. ) for advanced projects requiring closed-loop automatic control Ideal choice for building quadruped robots, hexapod walkers, robotic arms and other robotic projects requiring multiple servos Online Development Resources /User
Manuall: // bit. ly/3JK3kev PACKAGE CONTENT Servo Driver with ESP32 x1 Screws pack x1
Warranty & Returns
Warranty, Returns, And Additional Information
Warranty
- Please contact the Seller directly for warranty information. Warranty information may also be found on the Manufacturer's website.
- CONTACT
Return Policies
- Return for refund within: 30 days
- Return for replacement within: 30 days
- This item is covered by EmpressTech Return Policy
Manufacturer Contact Info
- For a directory of all our manufacturers, please click below.
- Manufacturers Directory
LOADING...