Rich Graphic and Video TutorialsProvides a user-friendly and cross-platform WEB application that integrates a simple and visualized coordinate control mode, making it easier to get started. Comes with rich graphic and video tutorials to help you learn and use it quickly. Compatible with ROS2 and various host computers, supports various wireless and wired communication modes. ^^ Meet Innovative RequirementsComes with an expansion plate, supports customizing the EoAT (End of Arm Tooling) to meet innovative application requirements. Completely open source for the control codes and communication interface documents of Roarm-M2-S, supports multiple languages and devices for secondary development.
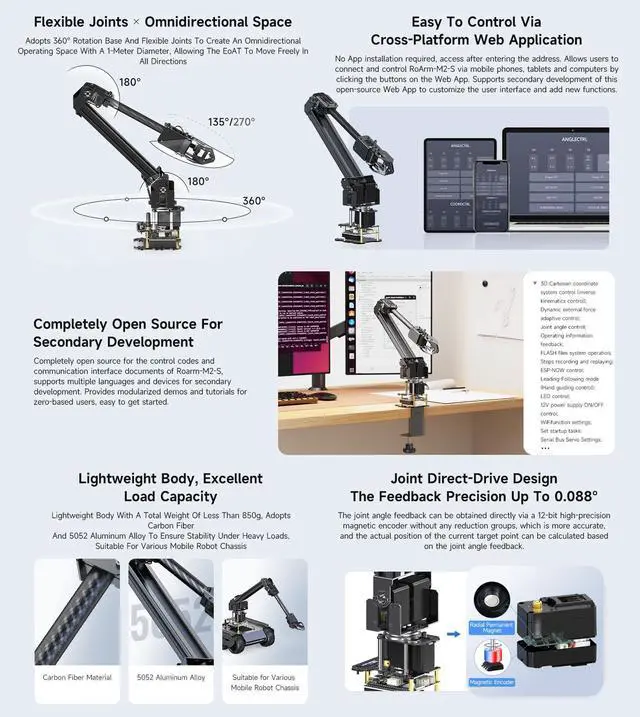
^^ Multiple Wirelesss Control Modes Onboard ESP32 MCU main control module supports multiple wireless control modes, provides control interfaces and rich communication protocols for easily connecting to various devices. ^^ 360 Omnidirectional WorkspaceAdopts a 360omnidirectional base combined with three flexible joints to create an workspace with a 1-meter diameter. Greater torque and wider range. ^^ Lightweight DesignRoArm-M2-S is a 4DOF smart robotic arm designed for innovative applications. Adopts lightweight structure design with a total weight of less than 850g and the effective payload of 0.5 kg@ 0.5 m, it can be flexibly mounted on various mobile platforms.
^^ Rich WiKi Resources We provide official Wiki resources, please contact us for more information.