RoArm-M2 series is a 4DOF smart robotic arm designed for innovative applications. Adopts lightweight structure design with a total weight of less than 900g and the effective payload of 0.5 kg@ 0.5 m, it can be flexibly mounted on various mobile platforms. Adopts a 360omnidirectional base combined with three flexible joints to create a workspace with a 1-meter diameter. ^^ Multiple EoAT mounting methods---The EoAT supports various mounting methods, can be used as a clamp or as the fourth degree of freedom. Provides Open-source DXF and 3D models for DIY and secondary development.
^^ Flexible joints x omnidirectional space---Adopts 360 rotation base and flexible joints to create an omnidirectional operating space with a 1-meter diameter, allowing the EoAT to move freely in all directions. ^^ Easy to control via Cross-platform Web Application---No App installation required, access after entering the address. Allows users to connect and control RoArm-M2 via mobile phones, tablets and computers by clicking the buttons on the Web App. Supports secondary development of this open-source Web App to customize the user interface and add new functions. ^^ Completely open source for secondary development--- Completely open source for the control codes and communication interface documents of Roarm-M2 series, supports multiple languages and devices for secondary development.
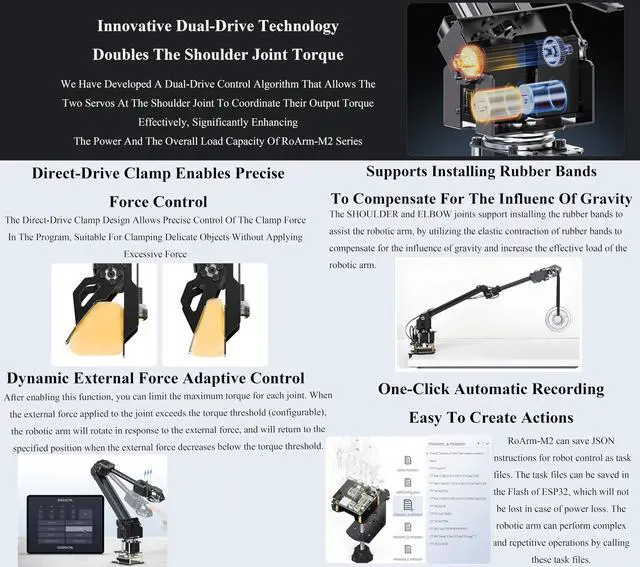
Provides modularized demos and tutorials for zero-based users, easy to get started. ^^ Innovative dual-drive technology, doubles the shoulder joint torque--- We have developed a dual-drive control algorithm that allows the two servos at the shoulder joint to coordinate their output torque effectively, significantly enhancing the power and the overall load capacity of RoArm-M2 Series ^^ Supports installing a camera to extend visual applications--- Comes with a camera holder and open source for the related drawings. You can directly install a camera with the corresponding size or other cameras with an adapter ^^ Comes with Online Development Resources /User
Manual: bit. ly/4gNUKdT